
Polybot
New autonomous discovery platform built in the Center for Nanoscale Materials.
Driving Scientific Discovery
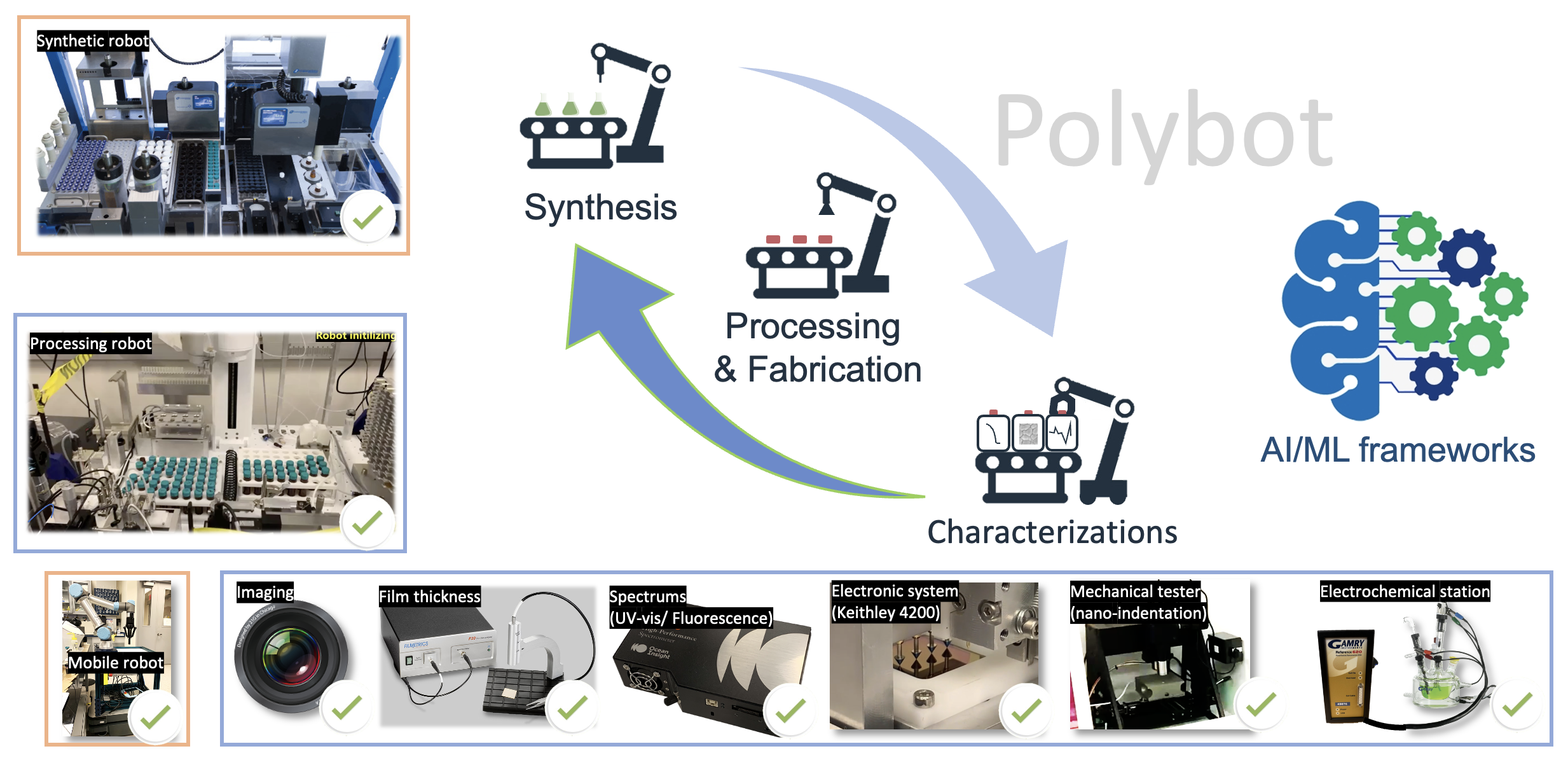
The purpose of Polybot is to drive scientific discovery with little to no human intervention by bringing together the power of robotics with high-performance computing and artificial intelligence, including machine learning. Polybot is capable of self-driving materials synthesis and fabrication, as well as robotic sample transfer, characterization, testing, and data analysis. This autonomous materials discovery framework is amenable to continuous improvement. Libraries of computational and machine methods, automated workflows, and datasets for different applications will be added to continually redefine the cutting edge of autonomous material discovery.
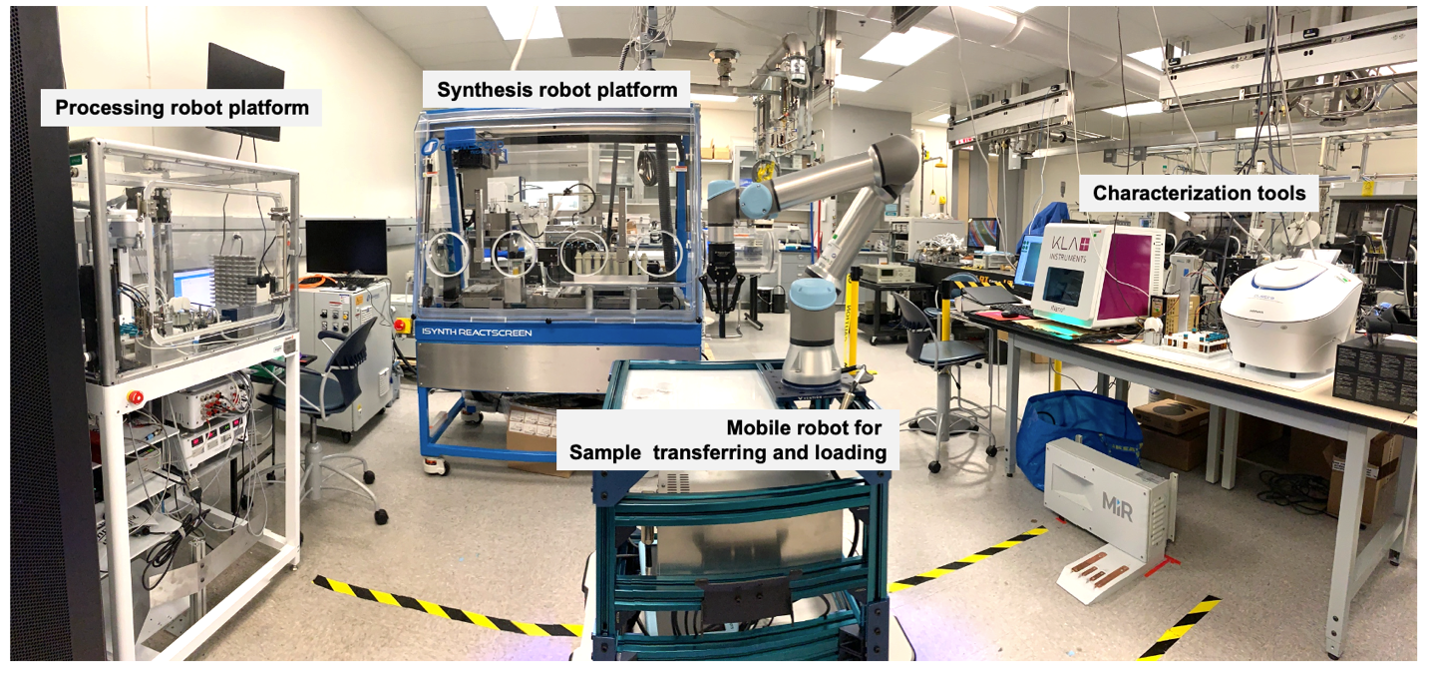
Polybot processing robot platform
Polybot is a machine learning-integrated modular robotic platform for material processing/characterization. It consists of five closely integrated components: modular lab automations, data extraction tools, database and cloud services, training software, and active learning library. The main Polybot components are as follows:
- Robotic solution-processing platform: The robotic solution-processing platform includes an enclosed frame (controlled experimental environment), pipetting system (for solution transfer), liquid handling system, substrate handling system, blade coating station (for film deposition), heating stage (film annealing), and sample storage plate. A Python-based software controls the automation and programs the workflow.
- Chemspeed synthesis robot platform: he robotic synthesis platform includes an enclosed frame (controlled experimental environment), liquid and powder handing system, reactors arrays, filtration system, and chemical storage systems. A Python-accessible software controls the automation and programs the workflow.
- Mobile robot: The mobile robot includes an MIR200 wheel robot, UR5e robot arm, and finger and vacuum grippers. The movement can be controlled and programmed by Python.
- Automated characterization tools (operation software controlled by Python):
- Imaging system: optical image characterization
- UV-vis/fluorescence spectroscopy : (polarized) absorption spectrum, fluorescent spectrum
- Electrical characterization system: automated probe station and Keithley 4200 electrical characterization system (electrical characterization)
- Mechanical characterization: automated sample loading stage and iNano indentation tester
- Electrochemical characterization system: automated sampling and Gamry potentiostat
Automated Experimentations with Polybot at the Center for Nanoscale Materials (CNM)
The Polybot Self-driving Lab
The Polybot Software Environment
Polybot
Polybot: An AI-Integrated Robotic Software Environment (ANL-SF-21-142)
Active learning library
The Polybot Software Environment has a native active learning module incorporating standard (e.g. Gaussian process regression) and CNM-developed (e.g. continuous-space Monte Carlo Tree Search) algorithms.
Data Extraction Tools
The Polybot Software Environment has a Python IDE and allows for Jupyter Notebook data analysis.
Data Storage Tool
The Polybot Software Environment leverages advanced Data Transfer and Management tools, and is connected to materials data repositories, including the Materials Data Facility.